TUW Multi Robot Navigation
Overview
Documentation: https://repositum.tuwien.at/bitstream/20.500.12708/2982/2/Spatio-temporal%20prioritized%20planning.pdf (This is a master thesis)
Key Info
In this navigation design:
- No communication between robots. All controls are done by the controller.
- Not sure if there’s local object avoidance function. Will check on it.
- Key message type, robot_info is documented here: http://docs.ros.org/melodic/api/tuw_multi_robot_msgs/html/msg/RobotInfo.html
Outbound
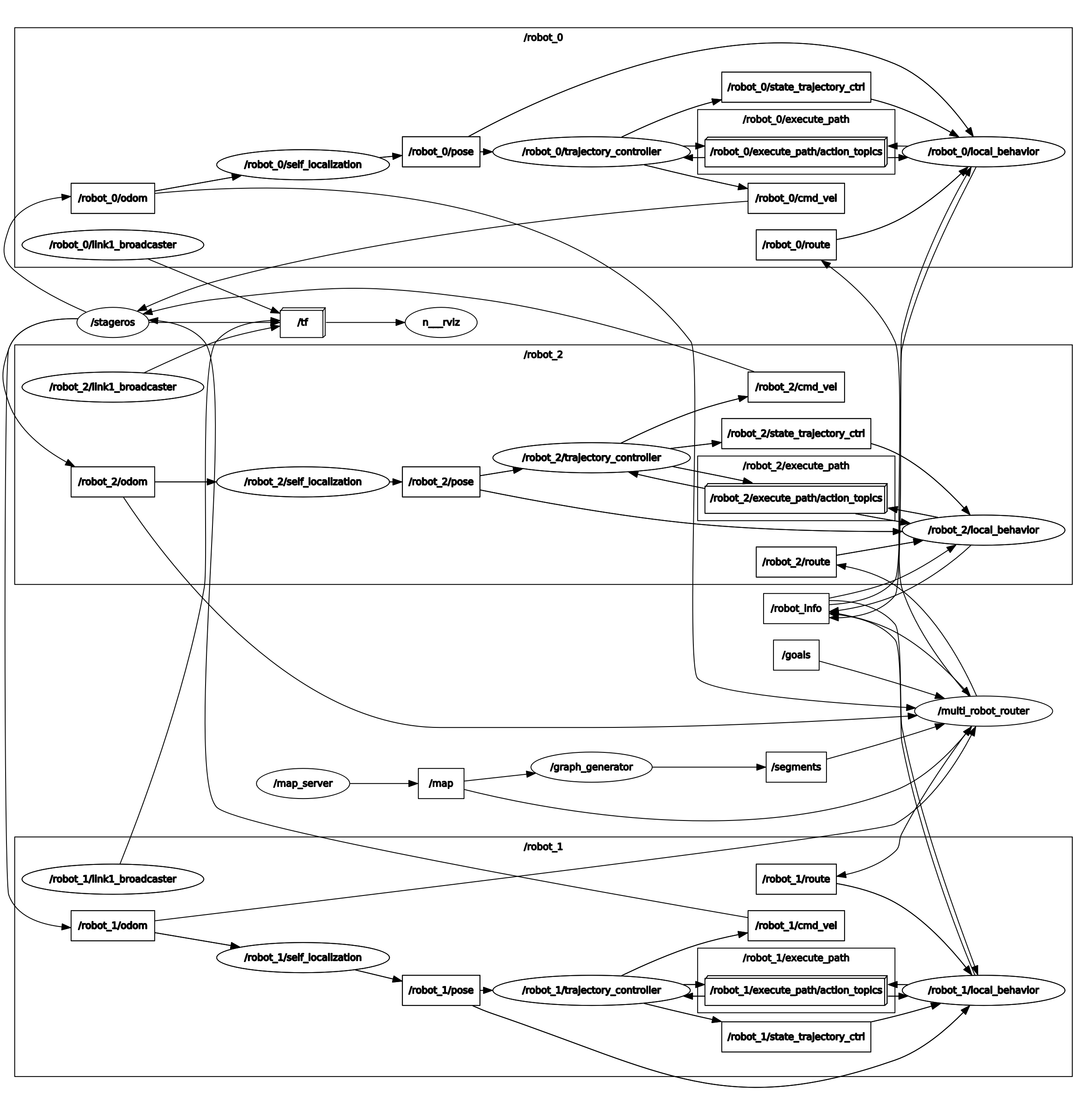
/robot_1/odom -> /multi_robot_router
/robot_1/local_behavior -> /robot_info
Inbound
/robot_1/route <- /multi_robot_router
/robot_1/local_behavior <- /robot_info
Dataflow Analysis
- Stop publish data: In most real-world designs, this shouldn’t cause any problem as robots should be designed to be robust. Delay/drop of communication is normal in wireless communication, especially when considering the various environments that robots are working in.
- In this specific scenario, robots only get path from the global route planner. Each robot subscribes to one topic created for this robot. So it shouldn’t be considered as broadcast.
- A false local position information can pause the functioning of the global map. Since the routes are calculated based on the location and the goal of each robot, specific situations may damage the whole system, which should be discussed.
RRT Exploration Module (Multi-robot)
Overview
http://wiki.ros.org/rrt_exploration
Documentation: http://ieeexplore.ieee.org/document/8202319